전자해머시스템
전자해머 시스템이란?
기존의 에어노크(기계식) , 기어해머(기계식), 진동모터(전기식)
마그네틱해머(전기식)의 단일 방식에서 전기적, 전자적, 기계적 성질을 종합한 세계최초의 복합형 바이브레이터 입니다.
생산현장은 기술의 발달로 점점 미세해지고, 복잡해지며, 입도
점도, 중량등 물리적 특성이 변화하고 있지만, 기존의 바이브레이터는 개발된지 20년이 넘었으며, 생산현장의 발전속도에 비해
기술의 발전은 이루어 지지 않고 있었습니다.
이로 인해 생산현장에서는 많은 애로사항이 있으며, 생산성저하
인건비의 증가 등으로 생산원가의 증가 뿐 아니라, 인력을 투입하여 햄머링 으로 인한 설비의 파손으로 이어져, 정비기간 및 비용이 증가가 되는 악순환을 겪고 있습니다.
이러한 문제점을 해결하기 위한 바이브레이터 시스템이 전자해머시스템이며, cake현상, bridge현상을 방지 및 해소시켜 주는
공정개선장치 입니다.
전자해머시스템 구동원리
- TD 구동원리
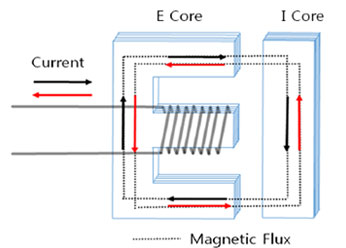
옆 그림.과 같이 “E형 코어”와 “I 형 코어”를 떨어뜨려 놓고
E형 코어에 감긴 도선에 전류를 교번하여 흐르게 하면 자속이 발생하게 됩니다.
이때 발생한 자속은 적층한 강판들을 자화시키게 되고 물리적으로 “E형 코어”와 “I형 코어” 사이를 떨어뜨려 두었기 때문에 “E형 코어”는 전자기력으로
“I형 코어”를 흡인하게 됩니다.
만일 교번하는 전류의 흐름을 차단하게 된다면 “E형 코어”와 “I형 코 어”는
분리를 가 될 것입니다.
이렇게 1초안에 흡인과 분리를 60회이상 반복하여 TD가 동작을 하게 됩니다.
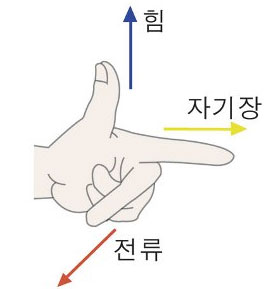
옆 그림은 플레밍의 왼손 법칙을 나타내는 것으로 엄지는 힘의 방향, 검지는
자기장의 방향, 중지는 전류의 방향을 나타내는 것입니다.
검지의 방향으로 자기장(자속)이 흐르고, 중지의 방향으로 전류가 흐를때
엄지의 방향으로 힘이 발생한다는 것입니다. 이 힘을 전자기력이라고 합니다.
이 플레밍의 왼손법칙이 전자해머시스템 TD의 기본원리 입니다.
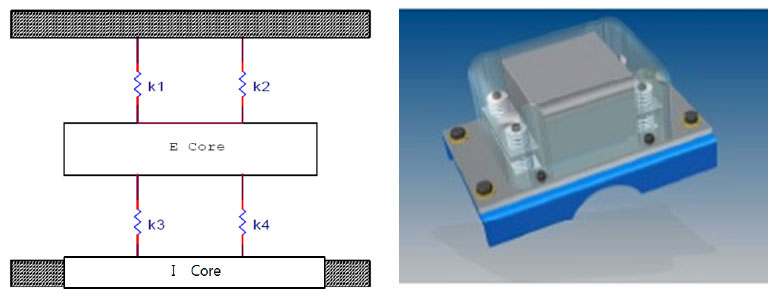
위의 발생된 전자기력 현상을 기계적 에너지로 변환하기 위하여 “E형 코어”를 강철 스프링에 고정하고 “I형
코어”를 강철 스프링 밑에 고정되어 있습니다.
위와 같은 조건하에 자속이 발생하면 강철 스프링의 장력을 전자기력이 이기고 흡인되는 과정 및 스프링이
복귀하는 과정에서 물리적인 진동을 발생 시킵니다.
전자해머의 특징
- 전자해머의 특성
구성된 전자해머 TD의 물리적인 충격량은 “E형 코어”의 권선에 주기적으로 전기에너지를 단속하여 공급함으로써 얻을 수 있습니다.
그러나 적절한 구동 알고리즘을 적용하지 않으면 “E I 결합코어”의 과전류
문제가 발생하고 효율적인 운동에너지를 얻기 어렵 습니다
이 같은 문제를 해결 하기 위하여 맥동파 구동 알고리즘을 개발 하게 되었습니다.
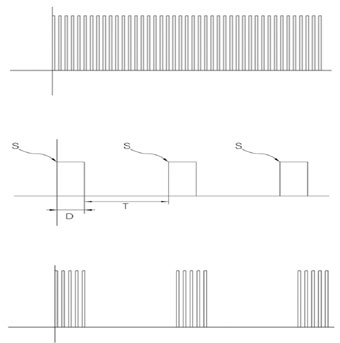
옆 그래프에서 처럼 파형 S는 전자해머 구동 펄스 원 파형 이고, D파형은
특정 구간만 동작 시키기 위한 간헐 동작 파형입니다. (a)와 (b)파형을 논리 AND 연산을취하면 (c)파형의 결과를 얻는데. 즉, (b)파형의 “D” 구간만 구동
파형이 존재하고, 나머지 구간“T”에는 존재하지 않으므로 전자 해머 입장에서는 전기에너지의 간헐 공급에 의한 맥동 운동에너지가 발생하고, 펄스 파형이 공급되는 구간에서는 진동에너지가 발생하게 됩니다..
(a)의 파형은 마이크로 콘트롤러의 PWM 발생 기능으로 구현 할 수 있으며,
(b)의 파형은 타이머 인터럽트에 의한 출력 포트 제어방식으로 구현 되어 있습니다. 전자해머시스템의 주파수 및 동작시간 구간을 사용자 인터페이스에 의하여 가변 할 수 있도록 설계 되어 있습니다.
- 맥동파란?
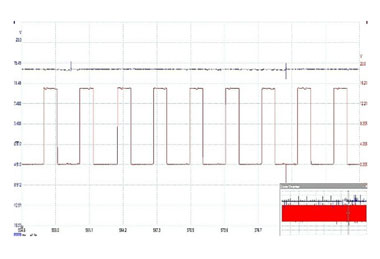
(b) 정상적인 일반 파형
그림(a)의 맥동파형맥동파란 불규칙한 파형을 일컫는 말이며,
오실로 스코프를 이용하여 파형을 측정해보면
과 그림(b)의 정상적인 파형의 차이점을
확인 할 수 있습니다.
전자해머시스템은 각 물체가 가진 고유진동 주파수를 이용하기에 맥동파를 이용하지 않고 일정한 파형의 고유진동 주파수를
사용하면, 장시간 사용시 설비파손이 일어 날수 있습니다.
또한 일정한 주파수진동은 원료나 분체를 더욱 뭉치게 할 수
있습니다.
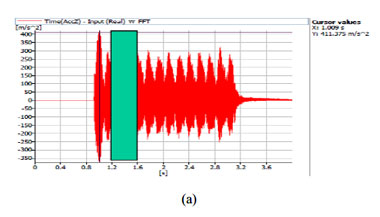
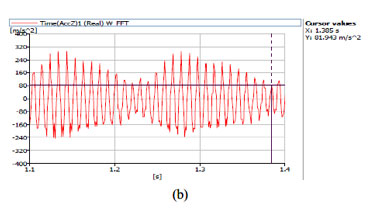
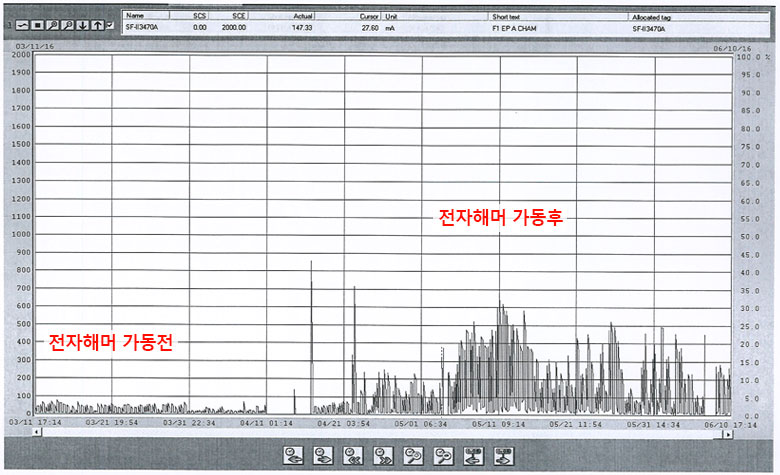
- 전자해머 파형 측정 그래프
1. 2초 동작 4초 휴지시간 설정
2. 그림(a) 전자해머 운전시 파형측정
3. 그림(b) 그림a 확대
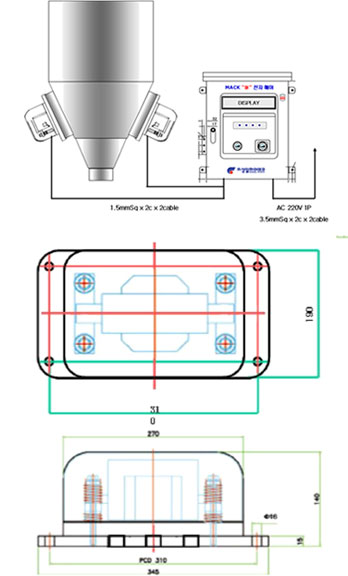
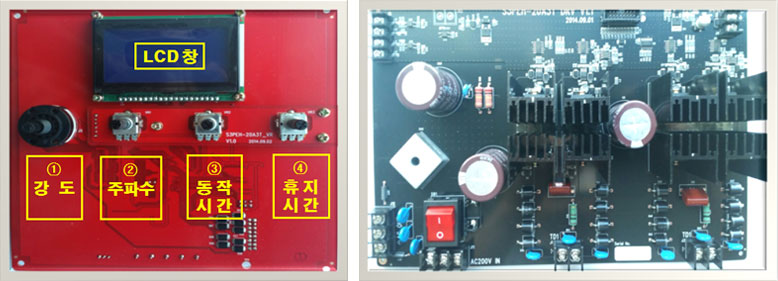
- 전자해머 컨트롤러 및 드라이버보드
1. 전자해머 시스템은 크게 TD(구동부), 컨트롤보드, 드라이버보드로 나뉘어져 있습니다.
2. 컨트롤보드를 통해 구동값이 설정되면, 드라이버보드로 전송되어 전압, 전류, 주파수를 TD(구동부)로 전송합니다.
3. LCD창은 한글로 정보가 표시되며, 조작이 간편해 누구나 쉽게 설정할 수 있습니다.
타 바이브레이터와 의 비교
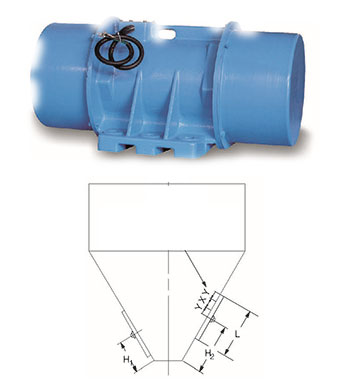
- 진동모터
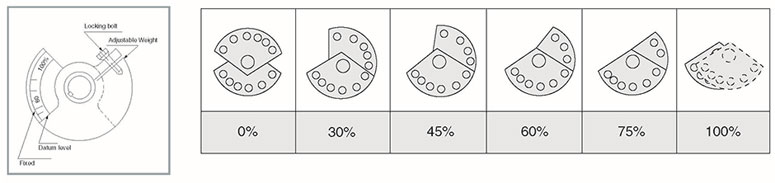
진동모터는 모터의 샤프트에 편심축(무게추)을 양쪽으로 연결하여 편심회전운동에
의한 진동을 발생시키는 장치이며, 진동력 세팅 방법은 아래 그림과 같습니다.
회전운동에 의한 진동력의 단점은 호퍼표면에 진동력을 전달하여 분체나 원료
를 이송시키는 방법이지만, 호퍼나 슈트등에 회전진동이 반사되어 진동모터를
연결한 지지대의 파손, 소음, 진동의 누수 등이 있습니다.
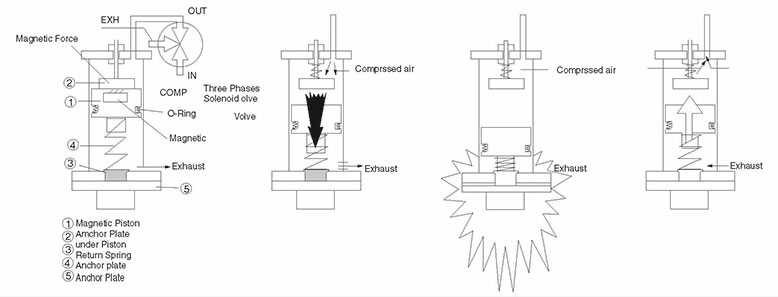
- AIR KNOCKER
에어노크는 공기를 압축하여 충격부를 뒤로 후퇴시킨 후 공기가 배출이 되면
충격부가 전면으로 빠르게 이동하여 타격을 가하는 기계식 장치 입니다.
에어노크는 호퍼나 슈트에 직접적인 타격을 가하는 방식으로 호퍼의 손상이나
에어노크 결합지그에 손상을 입힙니다.
단순한 타격방식으로 호퍼나 배관에 분체가 가득찬 상태이거나 수분율이 높을 경우
분체가 충격을 흡수하여 효과를 거의 보지 못하는 단점이 있으며, 충격세기를 조절
할 수 없습니다. 공장 제조시 이미 결정되어 있음.
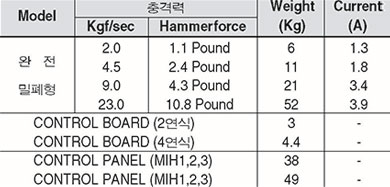
- MAGNETIC IMPACT HAMMER
마그네틱 임펙트 햄머는 에어노크와 같은 원리 이지만, 공기를 이용하지
않고 전기를 이용한다는 점이 틀립니다.
구성은 컨트롤 판넬과 구동부로 이루어 지며, 컨트롤 판넬에서 강도의 세기
연속타격횟수등을 설정 할 수 있습니다.
단점은 Kgf에 비해 무거우며, 소음이 심하게 나며 에어노크와 동일하게
분체가 수분을 함유하고 있으면 충격이 거의 이루어 지지 않습니다.
- 바이브레이터 종합 비교
| 구분 | 운용방식 | 동작형태 | 강도조절 | 주파수조절
| 토크
Kgf/cm2
|
|---|
| 에어노크 | 압축공기
| 직접충격 | 불가능 | 불가능 | 3.5~7
|
| 마그네틱 햄머
| 220v | 직접충격 | 가능 | 불가능 | 2.0~23
|
| 진동모터 | 220v~480v
| 편심회전진동
| 가능
(수동방식)
| 불가능 | 1/2 ~ 15
(hp)
|
| 전자해머 | 220v | 수직진동,충격
주파수진동
가변진동
| 가능
| 가능
| 160 |
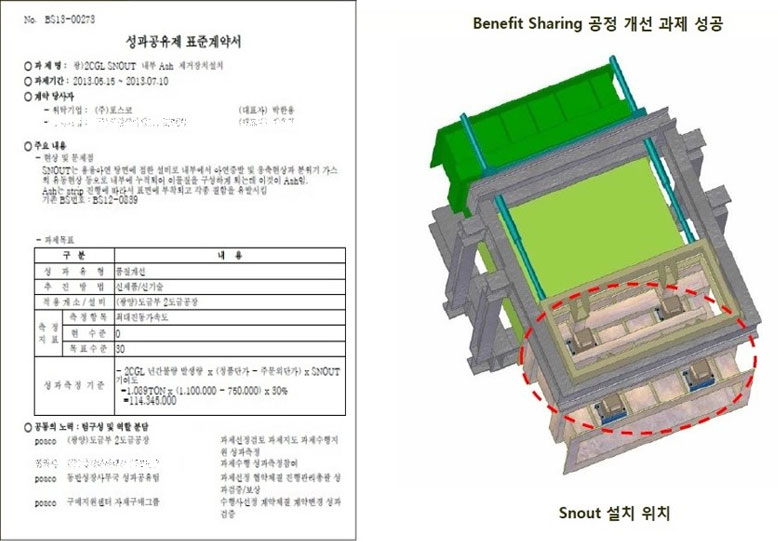
타사적용사례
- 포X코(광양) 2CGL(냉연도금) 공장
- 포X코(광양) 2코크스 공장
- TSL3공장(더스트)
Electronic Pulse DUST호퍼에 중간 V라인에 총 10EA 설치
- 석X제련소
- 롯X정밀화학
- 그 외 실적
| 부문 | 업체명 | 라인
| 년도
|
|---|
| 강원도 | 석O제OO | 석탄 호퍼, EP DUST, 보일러
| 2016년
|
|---|
| 경상도권 | SOM | 원료 ~ 포장 전체 라인(2차전지)
| 2015년
|
| 삼OSOO | 원료 이송 라인(2차전지)
| 2015, 16,17,18,19년 |
| 금O석OOO | 컴파운드 호퍼(타이어원료)
| 2014년
|
| 고O아O
| EP DUST, BAG FILTER
| 2017년
|
| 대O제O
| 원료이송라인(소맥피탱크 외 전라인)
| 2017년
|
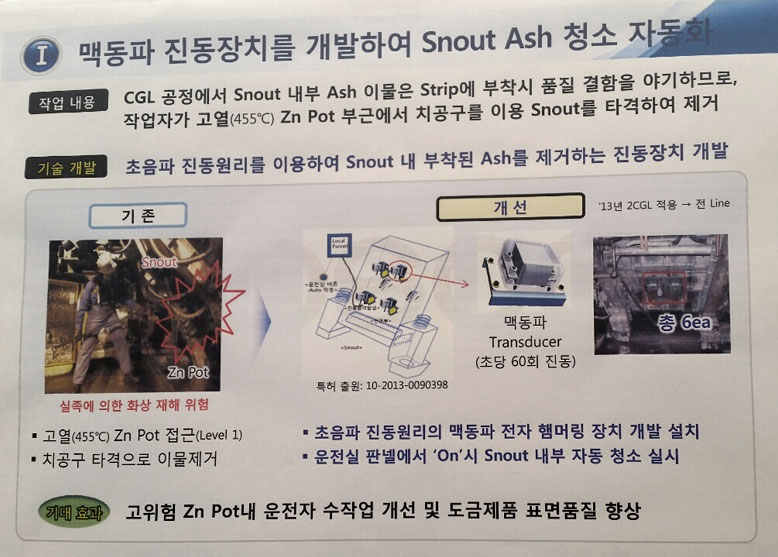
| 전라도권 | 포O코OO
| 냉연아연도금 강판 SNOUT
| 2014년
|
| 남O화O | 복비공장(비료), 신복비공장(비료),
원료야드(석고)
| 2016년
|
| 대O산O | LDEPE(플라스틱원료)
| 2017년
|
| 충청도권 | 롯O케OO | PE, PP라인(플라스틱원료)
| 2013년
|
| 한O토O
| LLD공장 안정제 투입 라인(플라스틱원료)
| 진행중 |
| 코O모OOO | 원료 이송 라인(2차전지)
| 2017년
|
| 해외 | 포O코 OOOOO | 아연강판 - SNOUT
| 2014년
|
| KOAOOOOO OOOOO
| 아연강판 – SNOUT
| 2015년
|
| 광O우(포O코)
| 아연강판 – SNOUT
| 2017년
|
| 고O아O OOO
| 2018년
| 2017년
|
| 삼OSOO OOO | 분체 증설설비
| 2019년
|
- 전자해머 사양서
| 전자해머 사양서 |
|---|
| REMOTE 사양 포함(DRY 접점) |
| EVM-02 | 판넬 1EA 컨트롤러 1EA, TD(진동기) 2EA, bracket 2ea |
| EVM-04 | 판넬 1EA 컨트롤러 2EA, TD(진동기) 4EA, bracket 4ea |
| EVM-06 | 판넬 1EA 컨트롤러 3EA, TD(진동기) 6EA, bracket 6ea |
| EVM-08 | 판넬 1EA 컨트롤러 4EA, TD(진동기) 8EA, bracket 8ea |